Also Software verwenden wir die Marlin Firmware.
Wir haben die aktuelle, empfohlene Version von der Marlin-GitHub Repository geklont und Konfiguriert.
Da es sich bei diesem 3D-Drucker um eine Delta-Bausweise handelt, müssen die Configuration.h & Configuration_adv.h im Stammverzeichnis mit
der aus dem Verzeichnis Marlin/example_configurations/delta/generic/* ersetzt werden.
In der Configuration_adv.h haben wir keine Änderungen vorgenommen.
Configuration.h:
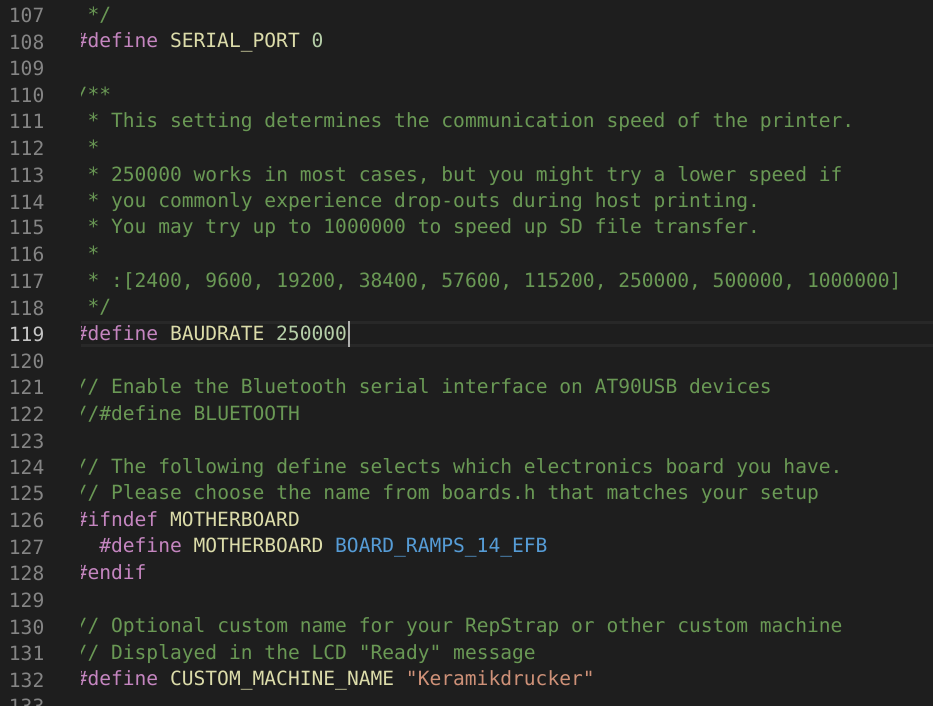
Zunächst muss eine Baudrate für die Serial-Kommunikation spezifiziert werden.
Wir haben uns für 250000 Baud entschieden, da diese Rate relativ schnell (z.B. SD Karten upload), aber dennoch stabil genug ist.
Anschließend muss das Motherboard bestimmt werden.
Da wir kein Motherboard (spezieller Marlin Arduino Shield) benutzen und den Arduino direkt mit den einzelnen Komponenten verbinden,
haben wir das Motherboard BOARD_RAMPS_14_EFB ausgewählt.
In der offiziellen Marlin-Dokumentation steht, dass man diese Option auswählen soll, falls man über kein dediziertes Motherboard verfügt.
Danach kommt der Name des 3D-Druckers.
Dieser wird beim Betrieb auf dem Display angezeigt.
Basis-Konfigurationsteil
Die Konstruktion besitzt lediglich einen Temperatursensor. Dieser überwacht die Extrudertemperatur.
Bett und Kammer werden nicht beheizt, daher sind auch keine weiteren Sensoren vonnöten.
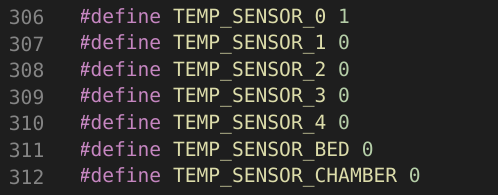
Temperatursensor Konfiguration
Als nächstes werden die physikalischen Endschalter konfiguriert.
Ein Deltadrucker muss zwingend über Maximalpositionsendschalter verfügen. Für Minimalpositionen sind diese optional.
Außerdem sind die Interrupt-Pins der Endschalter mit Pullup Widerständen versehen und liegen auf 5V, wenn ein Endschalter ausgelöst wird.
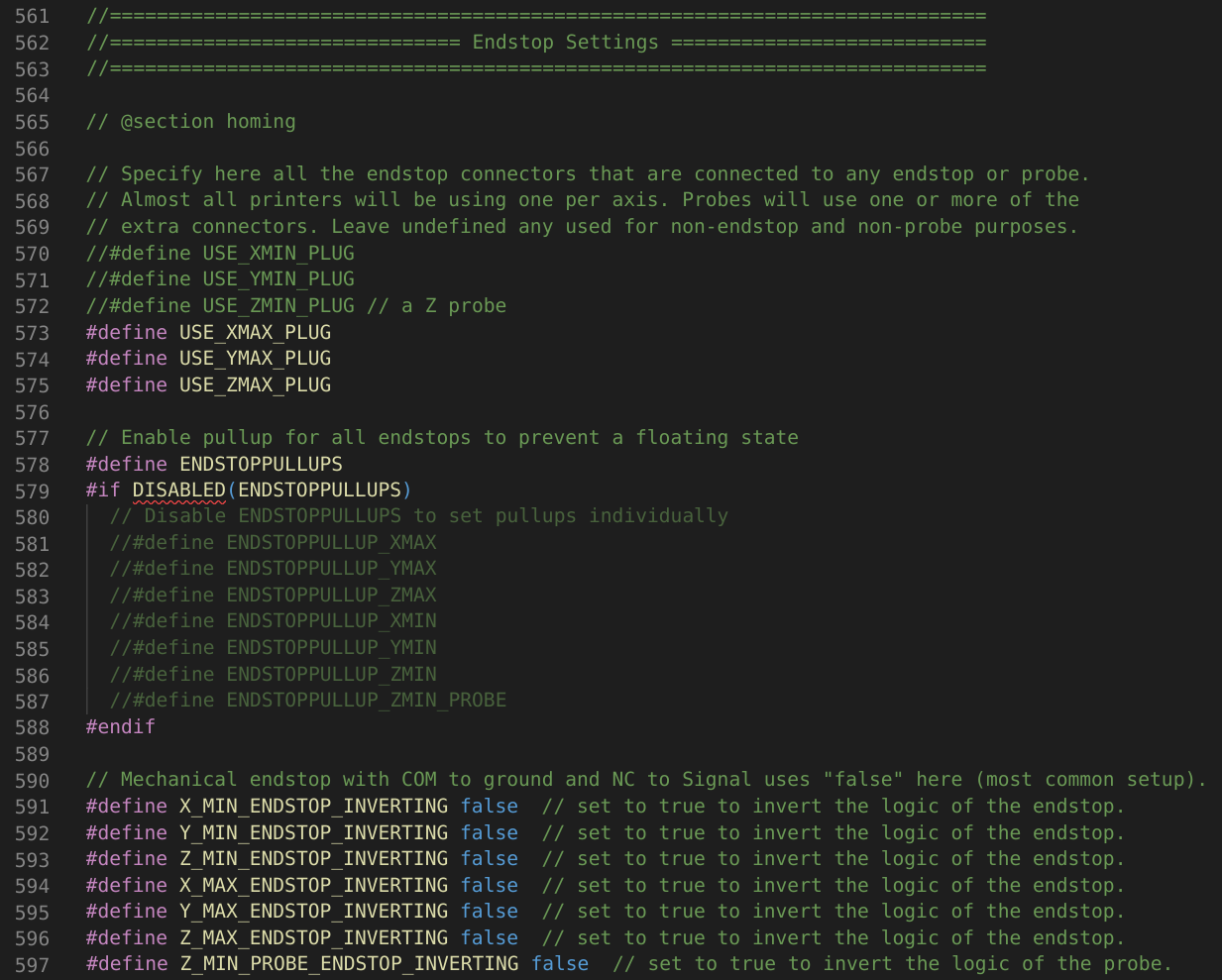
Physikalische Endstopp-Konfiguration
Das Interrupt-Feature für die Endschalter muss noch in der Konfiguration explizit angekündigt werden.
Ansonsten prüft die Software aktiv den Status der Endschalter und vebraucht zusätzliche Prozessorleistung.

Physikalische Endstopp-Konfiguration Interrupt-Feature
Zusätzlich kann man noch Software-Endstops definieren, die nach der physikalischen Kalibrierung (Homing) aktiv werden.
Für zusätzliche Sicherheit haben wir diese in unserem Aufbau für Minimal- und Maximalposition aktiviert.
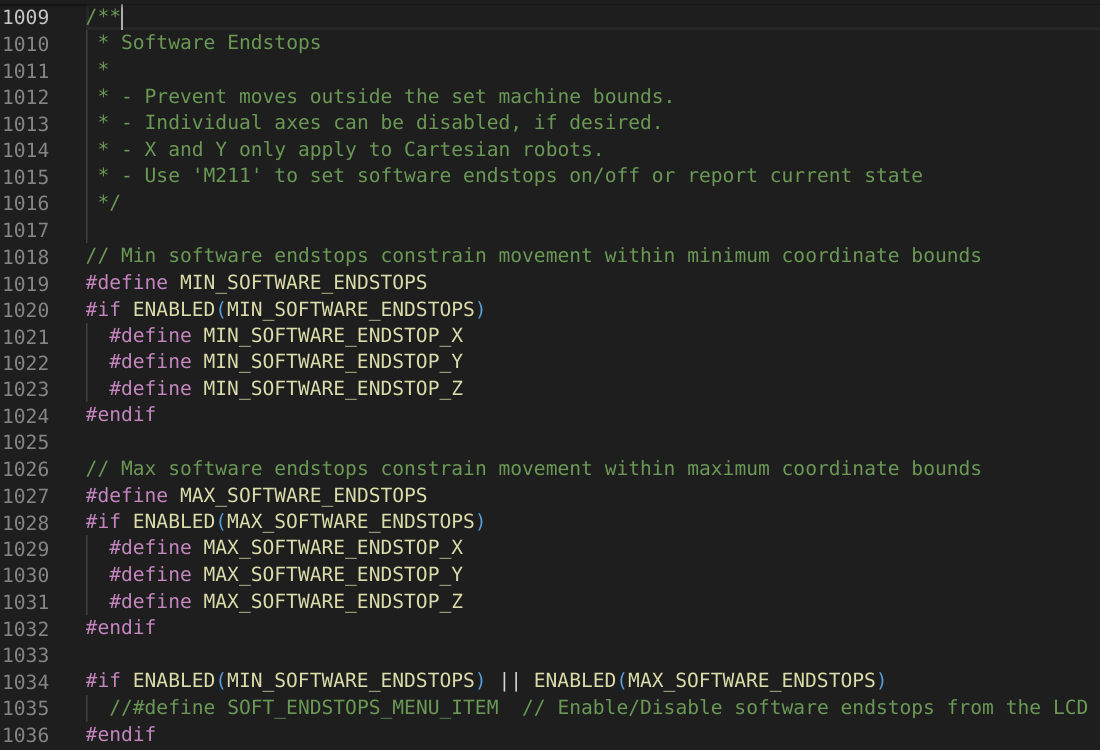
Softwareendschalter Konfigukartion
|