Bedienungsanleitung |
Bedienungsanleitung |
Das Projekt ist auf der Seite Quellcode als .zip-Datei zum Download bereitgestellt.
Ist diese heruntergeladen, muss sie zunächst entpackt und als "Existing Project into Workspace" unter dem Reiter "General" in Eclipse importiert werden.
Anschließend wird das Projekte "gebuildet". Dabei sollten folgende Fehler und Warnungen erscheinen:
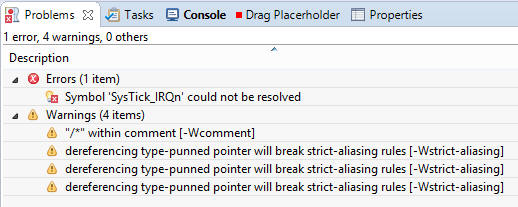
Abbildung 22.1: Fehlermeldungen und Warnungen
Die Fehlermeldung erscheint aufgrund eine ungenutzen Funktion.
Wird diese gelöscht, führt dies zu weiteren Fehlermeldungen.
Damit
das Projekt trotzdem läuft, müssen folgende Einstellungen unter
"Properties" -> "C/C++ General" -> "Indexer" geändert werden:
Abbildung 22.2: Einstellungen im "Indexer"
Wird das Projekt im Anschluss daran nochmals "gebuildet", verschwinden auch die übrigen Warnungen.
Sollten dabei Probleme auftreten, hilft das Durchführen von "clean", "refresh", sowie das Schließen und Öffnen des Projekts.
Vor Beginn der Übertragung sollte sichergestellt werden, dass alle Geräte richtig verkabelt und
betriebsbereit sind. In unserem Fall erfolgt sowohl die Daten-, als auch die
Energieübertragung durch ein USB-Kabel über den Laptop.
Das Projekt
kann anschließend über "Target" -> "program chip" auf das Discovery - Board
übertragen werden.
Ist das Projekt erfolgreich auf das Discovery - Board übertragen, erscheint folgende grafische Ausgabe:

Abbildung 22.3: Benutzeroberfläche
Zunächst wählt man die gewünschte Geschwindigkeit über den Slider.
Danach wählt man den Button "Linkslauf" um nach links zu fahren oder den Button "Rechtslauf" um nach rechts zu fahren.
Um virtuelle Endschalter zu setzen, müssen die Buttons "vEndschalter links" oder "vEndschalter rechts" betätigt werden. Die aktuelle Position wird dann als Endschalter gespeichert.
Um eine Dauerschleife zwischen den beiden virtuellen Endschalter zu fahren, wählt man den Button "Loop". Dies ist nur möglich, wenn beide Endschalter gesetzt sind.
Über den "Stop" - Button kann der Motor in jedem Betriebsmodus (manuell / Loop) angehalten werden.
|
|