Messungen |
Wie bereits beschrieben, sollen die Schaltung und das Substrat auf ihre Qualität überprüft werden. Deswegen wurden zwei unterschiedliche Sensoren jeweils zwei mal auf Substrat aufgebracht. Jeder Sensor kann zusätzlich die Temperatur erfassen und intern im Sensor verarbeiten. Die Sensoren geben den gewünschten Druck temperaturkompensiert als digitalen Wert aus. Dadurch ist keine A/D-Wandlung mehr nötig. Es muss lediglich, wenn gewünscht, aus dem Druck die Höhe berechnet werden.
Da die Temperatur bereits im Sensor kompensiert wurde, ist das später im Programm nicht mehr nötig.
Nun werden die Druckkurven von allen vier Sensoren gesucht und die Abweichungen zwischen Soll- und Ist-Höhe.
So kann man beurteilen, ob die Sensoren reproduzierbare Werte liefern und wie groß die Abweichungen zwischen den ST- und Bosch-Sensoren sind.
In folgenden Szenarien wurden Messungen durchgeführt:
Im Freien bei einer Höhenänderung von einem Meter
Im Gebäude bei einer Höhenänderung von 3 Stockwerken: Höhenänderung durch laufen, Höhenänderung durch Aufzug
Im Gebäude bei konstanter Höhe zur Ermittlung der Standard-Abweichung
Montiert auf Rütteltisch während der Einwirkung von verschiedenen Frequenzen
---------------- MESSUNG Rütteltisch --------------
--->> Videoaufnahme der Messung <<---
Bei dieser Messung wurde das Keramiksubstrat auf einem Rütteltisch fixiert und verschiedenen Frequenzen ausgesetzt. Zuerst muss man aber feststellen, welche Frequenzbereiche für diesen Test besonders interessant sind.
Für diesen Test sind zwei Frequenzen sehr interessant:
o - Die Drehfrequenz der Rotoren des Multikopters
o - Die Eigenfrequenz des Substrats
Da das Keramiksubstrat bei einem Multikopter angewendet werden soll, ist als erstes festzustellen, welche äußeren Einflüsse bei genau diesem Anwendungsfall auftreten. Es ist anzunehmen, dass die Drehfrequenz der Rotoren den größten Anteil der Schwingungen einnehmen wird, da mehrere Rotoren bei diesem Fluggerät verbaut sind und alle nahezu die gleiche Frequenz haben.
Laut Datenblatt haben die Rotoren 300 1/min*Volt. Die Systemspannung beträgt 22,2 V. Damit ist die Nenndrehzahl im Flugbetrieb 300 1/min*Volt * 22,2 Volt = 6.660 1/min.
Der Rütteltisch hat aber bei genau diesem Drehzahl-Bereich seine Eigenfrequenz. So war es nicht möglich, genau diese Frequenz zu testen. Deswegen wurden bei zwei Messungen die Frequenzen 1 kHz bis 6 kHz und 5 kHz bis 6 kHz gemessen, indem die Frequenz gleichmäßig erhöht wurden.
Die Eigenfrequenz des Substrates ist sehr wichtig, da es bei diesen Frequenzen besonders anfällig ist. Gerade deswegen ist es interessant, diese Frequenzen zu testen.
Die Eigenfrequenz kann über zwei Methoden erfassen:
o
- - Mit einem Hammer zum Schwingen anregen und Schwingung erfassen
o - Erstellung eines FEM Modelles und simulieren der Eigenfrequenz
Das Anregen mit einem Hammer und das erfassen der Schwingungen war bei diesem
Substrat nicht möglich. Bei diesem Versuch müsste man Sensoren auf dem Substrat
aufbringen, die die Schwingung erfassen. Das Substrat hat aber eine so geringe
Masse, dass die Schwingungsaufnehmer die Masse zu stark beeinflussen würden und
somit das Ergebnis verfälschen würden.
Deswegen wurde ein FEM-Modell erstellt und per Simulation die Eigenfrequenz bestimmt. Für die FEM-Simulation wurde das Keramiksubstrat exakt nachgebildet mit den genauen Dimensionen und Materialeigenschaften.
Die FEM-Simulation wird mit zwei Varianten durchgeführt:
· - Das Keramik-Substrat komplett frei im Raum
· - Das Keramik-Substrat eingespannt an zwei Seiten, wie z.B. mit einer Unterlagscheibe
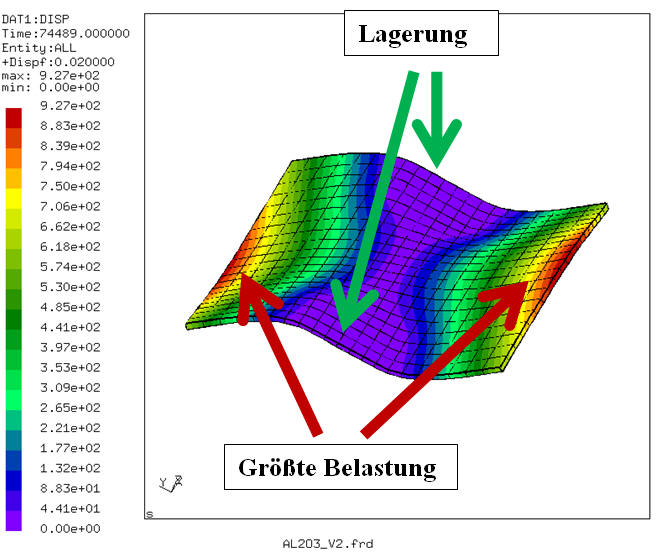
Prinzipskizze des Keramik-Substrats im eingespannten Zustand:
FEM-Modell im eingespannten Zustand:
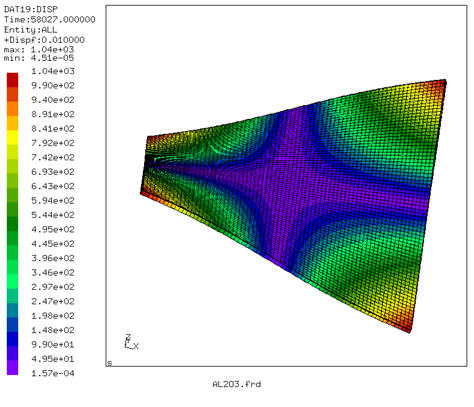
FEM-Modell im freien Zustand:
Eigenfrequenz
Uneingespannten Zustand:
58 kHz
84 kHz
98 kHz
147 kHz
148 kHz
250 kHz
Eingespannter Zustand (seitlich mit jeweils einer Schraube):
47 kHz
79 kHz
130 kHz
174 kHz
192 kHz
.... >> 200 kHz
--------- MESSUNG Rütteltisch 1kHz bis 6 Khz ----------
Bei den Messergebnissen sind keine großen Abweichungen zu erkennen. Die Abweichung beim Absolutdruck zwischen den LSP-Sensoren und den BMP-Sensoren war auch in Ruhelage – ohne Vibrationen – so stark. Es waren auch keine Aussetzer oder andere Fehlfunktionen in der Software oder der Elektronik wahrnehmbar. Die Messungen wurden alle ohne Änderung der Höhe durchgeführt, das heißt die Soll-Höhe beträgt 0m. Die Abweichung zwischen Soll- und Ist-Höhe ist minimal größer, als in Ruhelage.
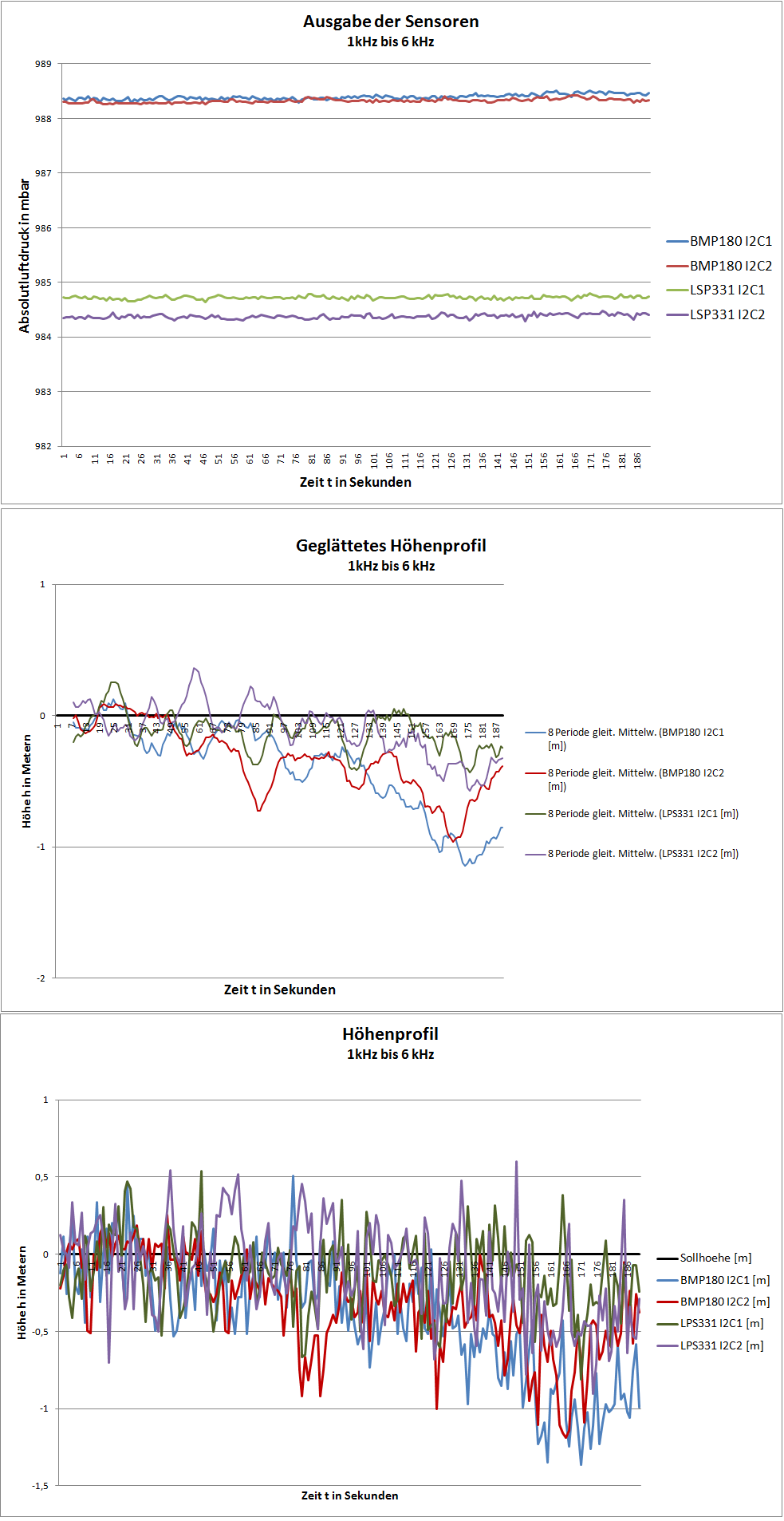
---- Excel Datei Messung Rütteltisch 1 kHz bis 6 kHz----
Diese Messergebnisse sind ähnlich den Messergebnissen von der ersten Messung von 1kHz bis 6 kHz. Daraus lässt sich schließen, dass die Höhe der Frequenz keine besonderen Auswirkungen auf die Messergebnisse hat, da sich im gesamten Frequenzbereich von 1kHz bis 6kHz und von 5kHz bis 6kHz keine gravierenden Abweichungen ergeben.
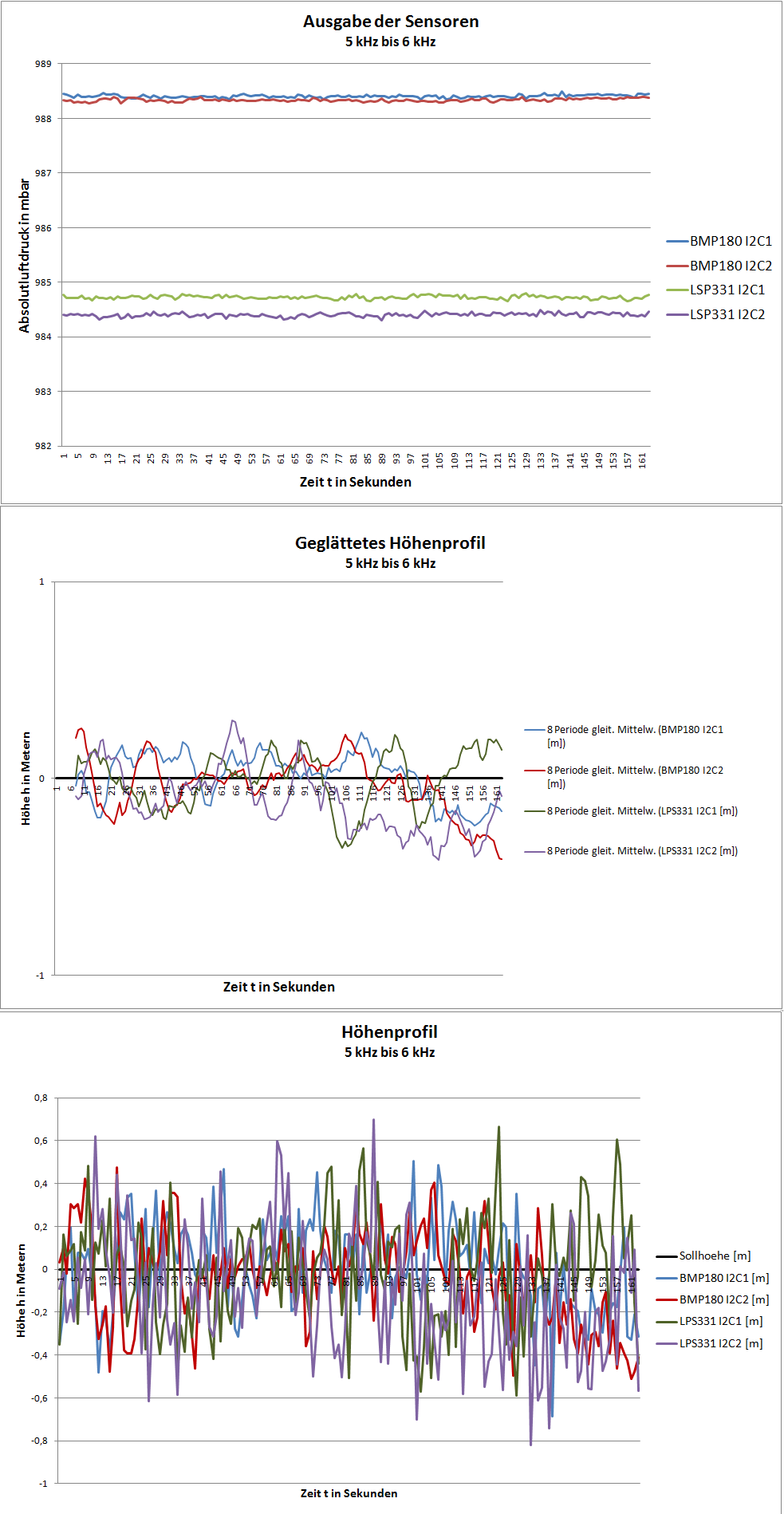
---- Excel Datei Messung Rütteltisch 5 kHz bis 6 kHz----
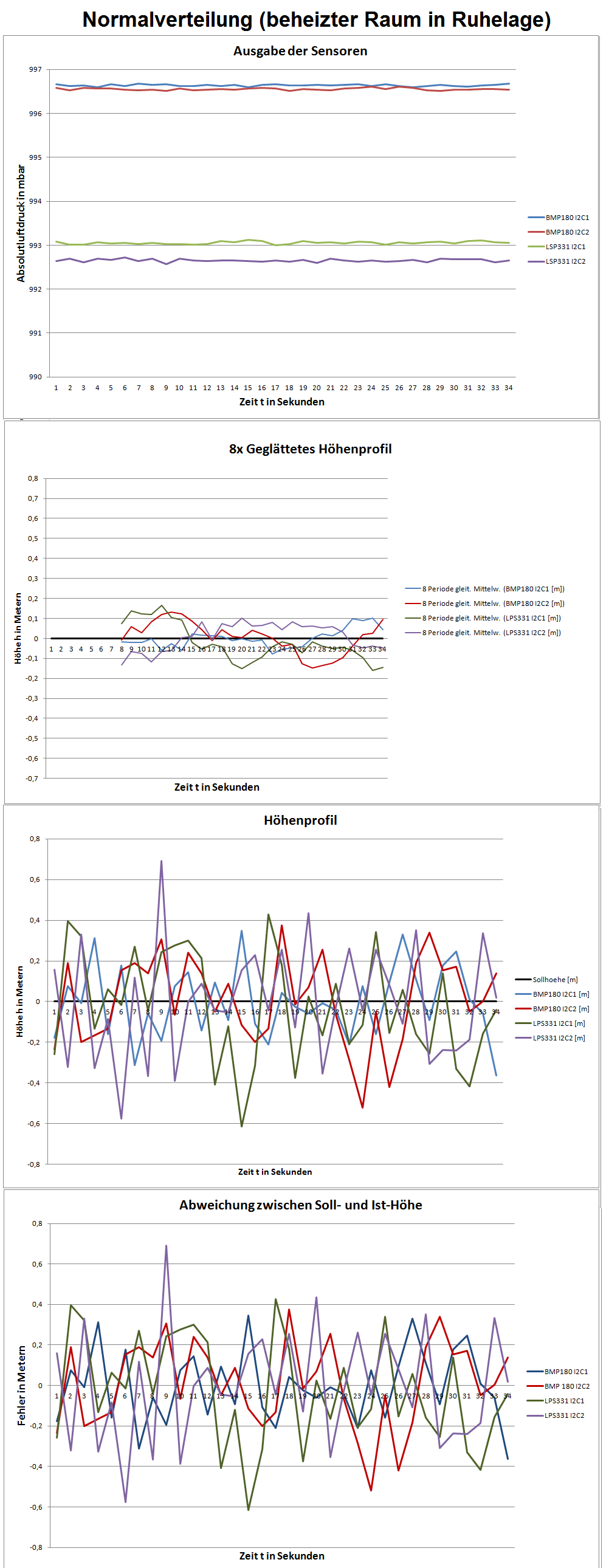
------------------- MESSUNG Normalverteilung --------------
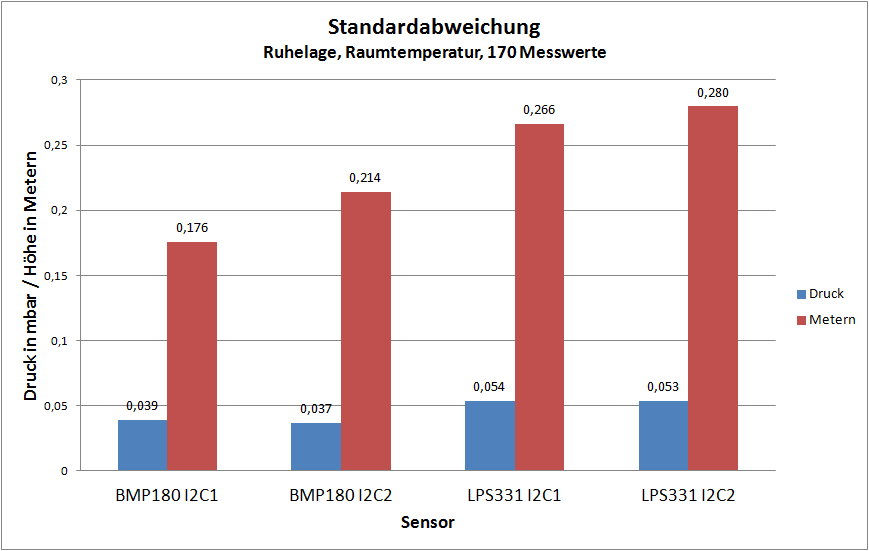
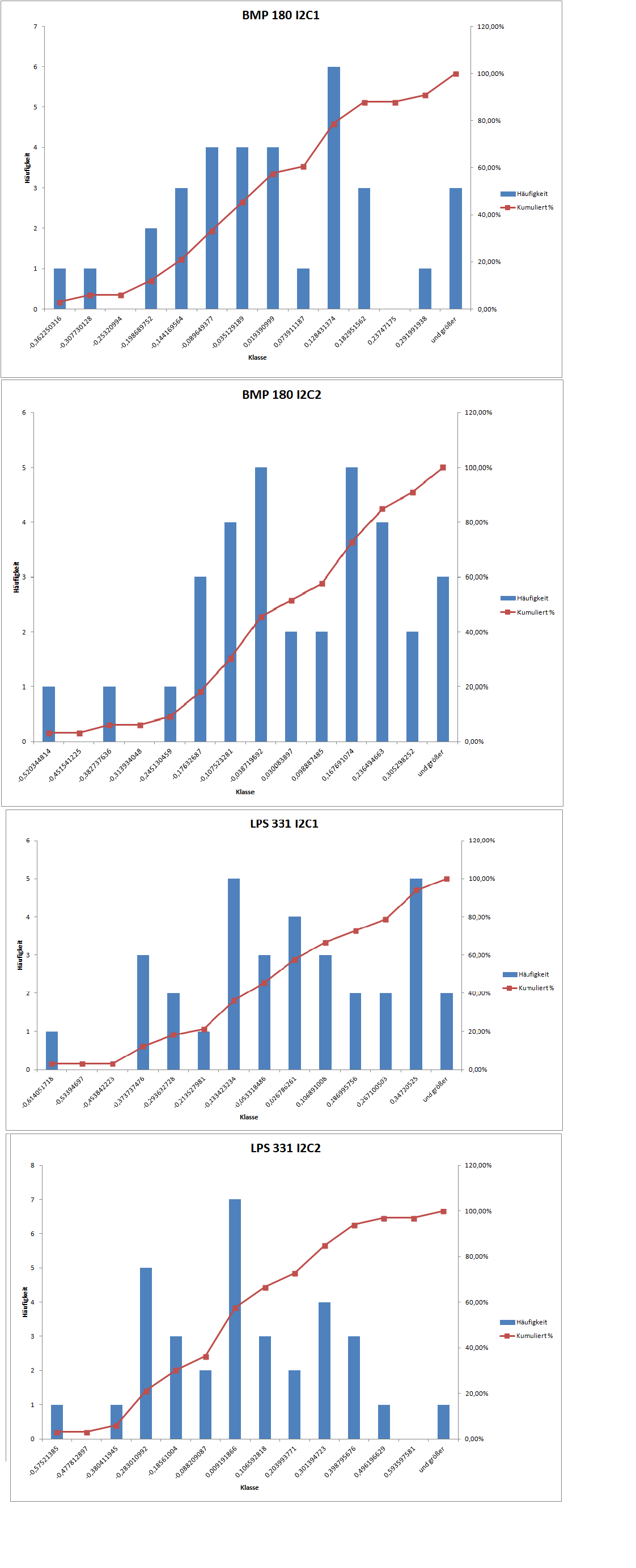
Bei dieser Messung wurde die Normalverteilung bzw. das Rauschen ermittelt. Die Sensoren wurden bei Raumtemperatur auf einen Tisch gelegt und über die gesamte Messung nicht bewegt. Es ist zu erkennen, dass die BMP 180-Sensoren ein geringeres Rauschen haben, als die LSP331-Sensoren.
Weiter unten sind die Histogramme der Sensoren zu sehen.
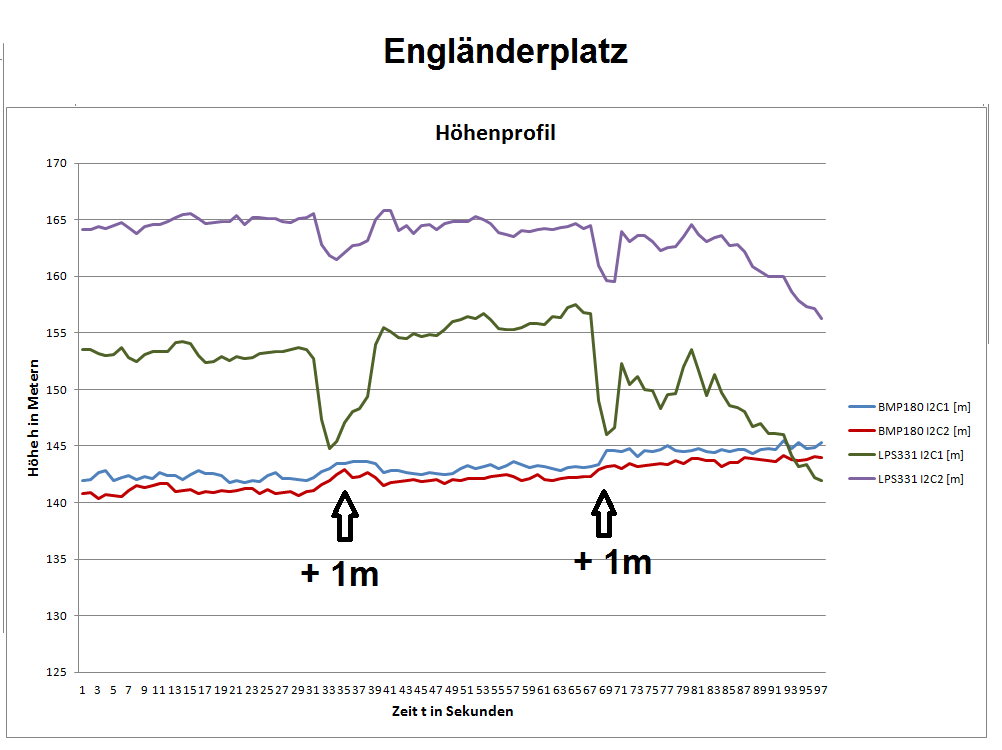
------------------- MESSUNG Meereshöhe am Engländerplatz --------------
Bei dieser Messung wurde die Meereshöhe am Engländerplatz bei 5°C Außentemperatur gemessen und nicht genullt. Die Sensoren wurden zwei mal um jeweils einen Meter nach oben bewegt.
Es sind bei beiden LSP331-Sensoren ein Ausschlag zu erkennen. Da er beiden
Sensoren ist, ist ein systematischer Fehler zu vermuten.
Der Ausschlag ist
exakt an dem Zeitpunkt, als wir das Substrat um 1m nach oben bewegt haben.
Deswegen lässt sich folgern, dass die ruckartige Bewegung das Messergebnis beim
LSP331-Sensor negativ beeinflusste. Beim BMP 180-Sensor hatte die Bewegung aber
nahezu keinen negativen Einfluss.
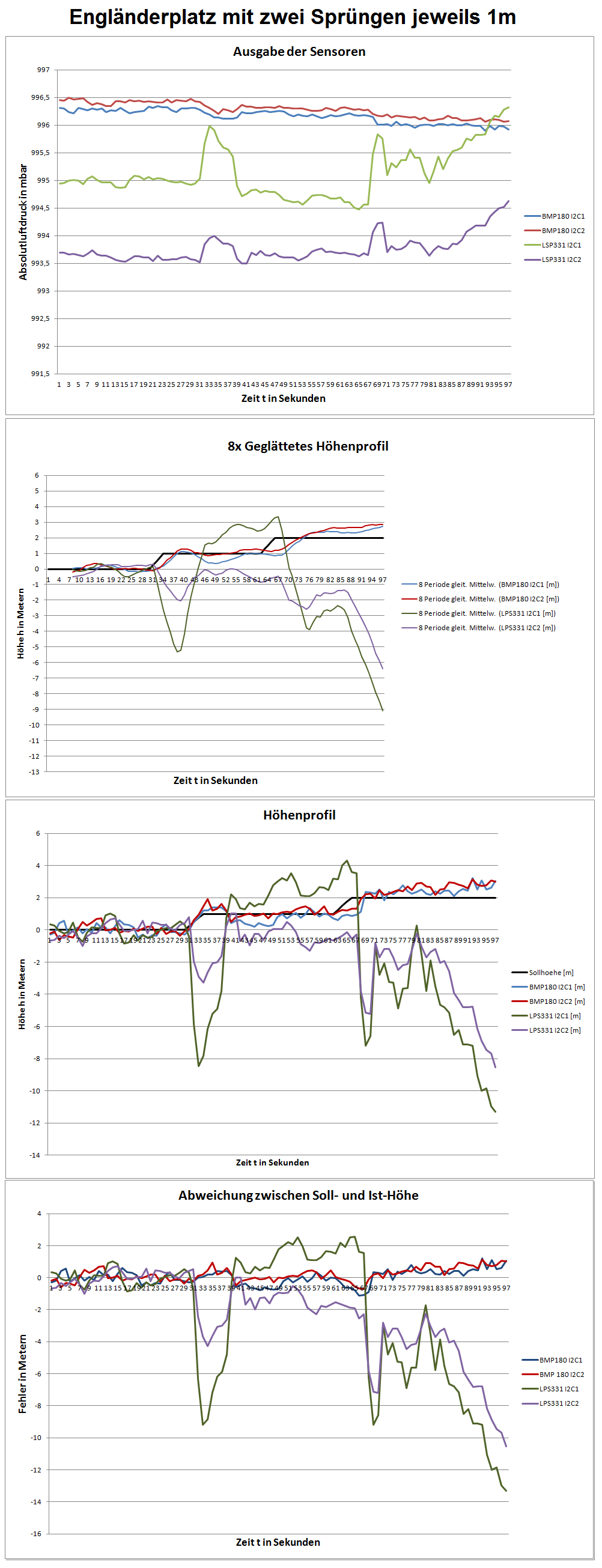
------------------- MESSUNG Engländerplätz --------------
Das Messsystem wurde am Engländerplatz getestet. Es herrschte eine
Umgebungstemperatur von ca. 5°C. Es wurde klar, dass die Sensoren nur sehr träge
ihre Temperatur von Raumtemperatur zu der Außentemperatur beim Verlassen des
Gebäudes änderten. Dadurch wurde die Messung erst gestartet, als das Substrat
komplett runtergekühlt war, um die Messung nicht zu verfälschen.
Das System wurde 30 Sekunden auf 0m gehalten und genullt, nach 30 Sekunden um 1m erhöht, 30 Sekunden gewartet und anschließend 30 Sekunden auf 2m gemessen.
Es ist hier klar zu erkennen, dass der BMP 180-Sensor (+/- 1m) viel genauer ist, als der LSP331-Sensor (+3/-10 m).
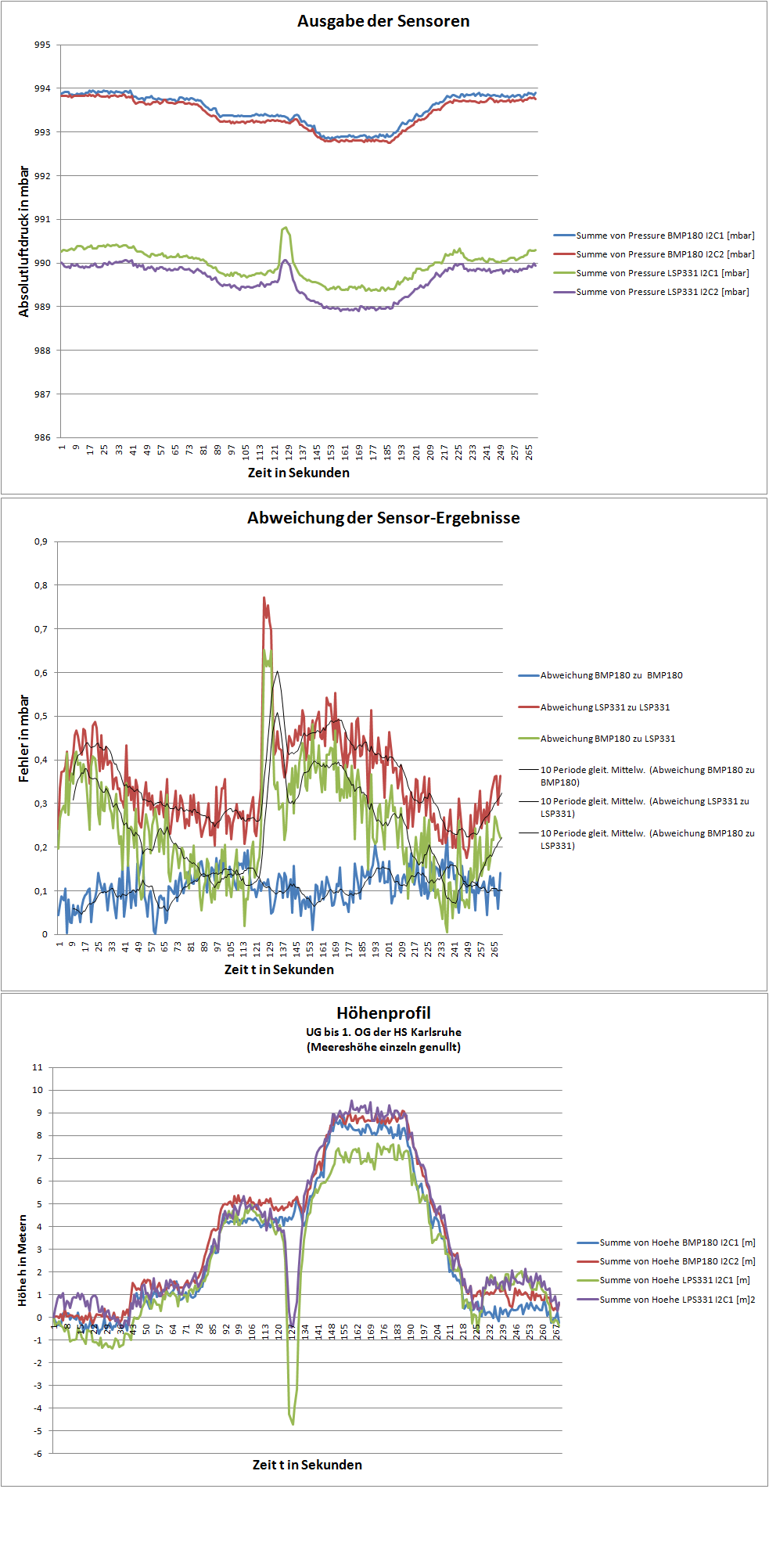
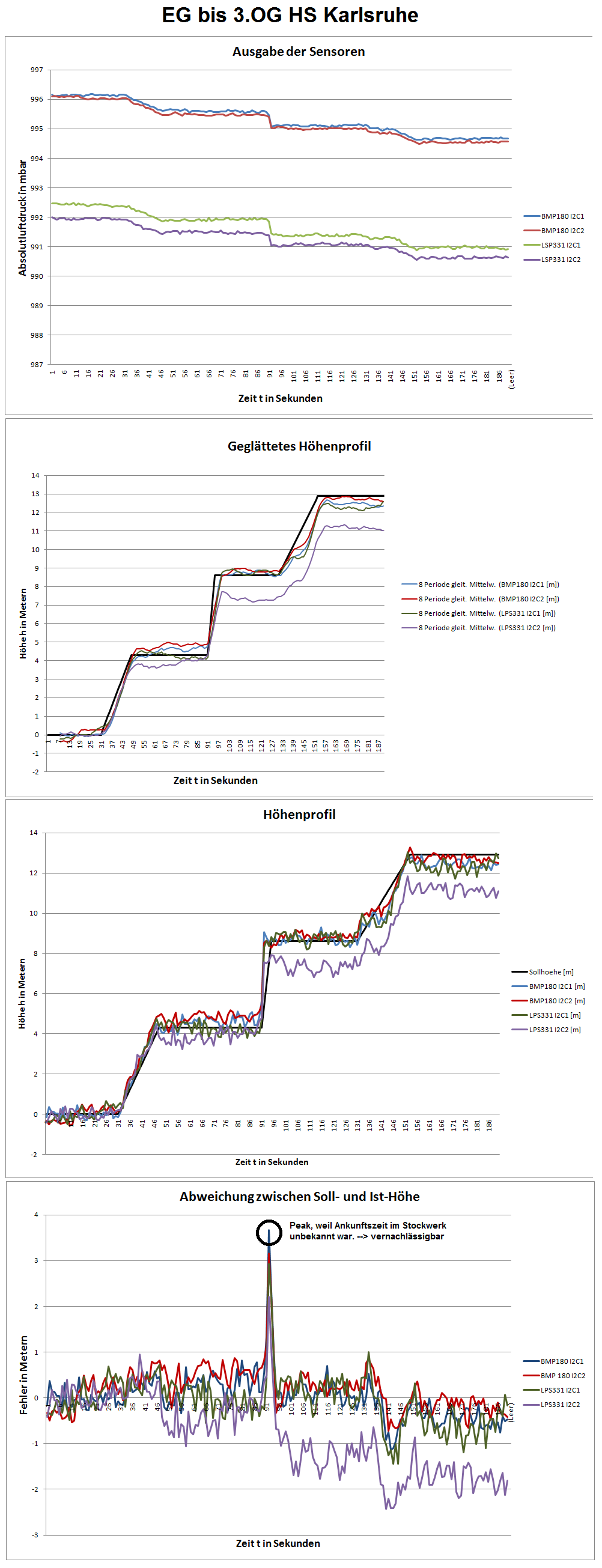
------------------- MESSUNG EG bis 3. OG HS Karlsruhe --------------
Das Messsystem wurde drei Stockwerke über die Treppe nach oben getragen.
Durch das Tragen haben Erschütterungen auf das System eingewirkt.
Die Stockwerke sind klar zu erkennen. Die BMP 180-Sensoren sind am genausten und konstantesten. Die Abweichungen beträgt nur +/- 1 Meter zwischen Soll und Ist-Messung. Die Sensoren haben auch zügig auf die Änderung der Höhe reagiert. Durch die 8-fache Glättung lässt sich eine hohe Genauigkeit erreichen auf gleichbleibenden Höhen-Niveaus. Weil in diesem Fall die Bewegungen sehr langsam waren, wird es durch die Glättung nicht ungenau.
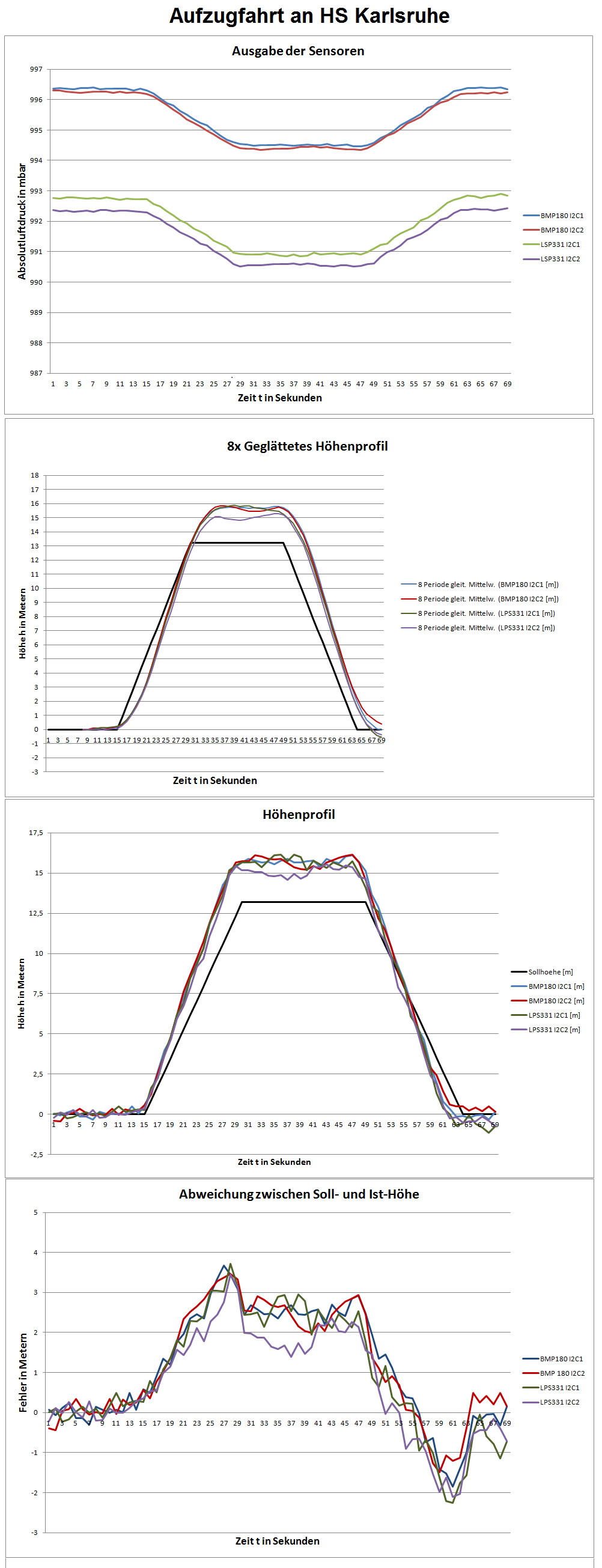
------------------- MESSUNG AUFZUGFHART
--------------
Es wurde eine Aufzugfahrt von drei Stockwerken bei Raumtemperatur an der
HS Karlsruhe gemessen, um die Trägheit und Genauigkeit der Sensoren zu
beurteilen.
Wie zu sehen ist, wird die Höhe durch die 8-fache Glättung ziemlich ungenau, weil es durch die Glättung träge wird. Die Abweichung zwischen Soll- und Ist-Höhe ist bei allen Sensoren etwa gleich.
------------------------- Erste Messung -----------------------
HS Karlsruhe UG bis 1. OG
|
|
|
|
Bearbeitung:
Teilnehmer: Betreut durch: |
Barometer Lukas Schmidt, Jochen Rieger Prof. J. Walter |
|
|