Auswertung der Messergebnisse |
Zur Validierung des Sensors mussten wir die charakteristische Entfernungsmessungskurve aufstellen. Hierzu haben wir den im Datenblatt angegebenen Messbereich von 100-550cm abgedeckt. Gemessen wurde auf ein weißes, DIN A2 Papier. Die Gemessene Analogspannung wurde per ADC-Wandler in eine I2C Signal gewandelt und mit Hilfe des SMT32 Discovery Boards abgefragt. Im Prozessor wurden die Messwerte nun wieder einen analogen Wert gewandelt. Die Messwerte haben wir in Excel ausgewertet.
Wir testeten den Sensor auch unter Einfluss von Vibration um eine Vibration des E-VOLO zu simulieren.

Abbildung 1: Halterung mit Sensor und Rasierer für Vibrationsmessungen
Wie in den Diagrammen zu sehen ist, stimmen die gemessen Werte mit dem Diagramm aus dem Datenblatt überein.
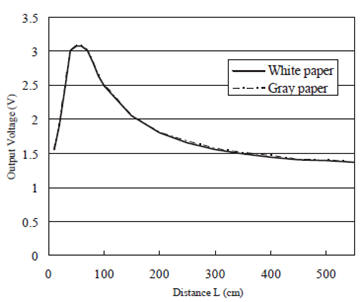
Abbildung 2:Entfernungsmessungscharakteristik Datenblatt
Abbildung 3: Gemessene und ausgewertete Signale
Messungen der Abweichungen bei unterschiedlichen Entfernungen:
Um die Ungenauigkeiten des Sensors darzustellen maßen wir bei 2,3,4 und 5m jeweils 25 Messwerte und bildeten den Mittelwert und die Standartabweichung der Messwerte. Dadurch ermittelten wir das Verhältnis zwischen Entfernung und Spannung des Sensors. Anhand der Standartabweichung kann nun die Standartabweichung in cm bei unterschiedlichen Entfernungen ermittelt werden.
Durch eine Glättung der Messwerte mit der Formel des FIR Filters steigerten wir die Genauigkeit des Sensors. Zur Glättung der Messwerte wurde folgende Formel verwendet:
Anhand der Diagramme kann man erkennen dass der Unterschied zwischen den Messwerten mit Vibration und Ohne sehr gering ist. Dies ist einer der Vorteile eines Infrarot-Sensors.
Durch zweimaliges Glätten der Messwerte konnte die
Abweichung von max.
![]() 4cm
bei 5m Entfernung auf
4cm
bei 5m Entfernung auf
![]() 2,5cm
reduziert werden.
2,5cm
reduziert werden.
Die Messwerte sind in folgender Datei zu finden:
|
|