Roboterarbeitsplatz der HS-Karlsruhe |
|
Technische Daten des
Roboters und der Steuerung
Allgemeines Der Roboter KR
125/1, ist ein sechsachsige Industrieroboter mit Gelenkkinematik für
alle Punkt-- und Bahnsteuerungsaufgaben. Haupteinsatzgebiete sind:
Er kann am Boden
und an der Decke eingebaut werden. Die Nenn -
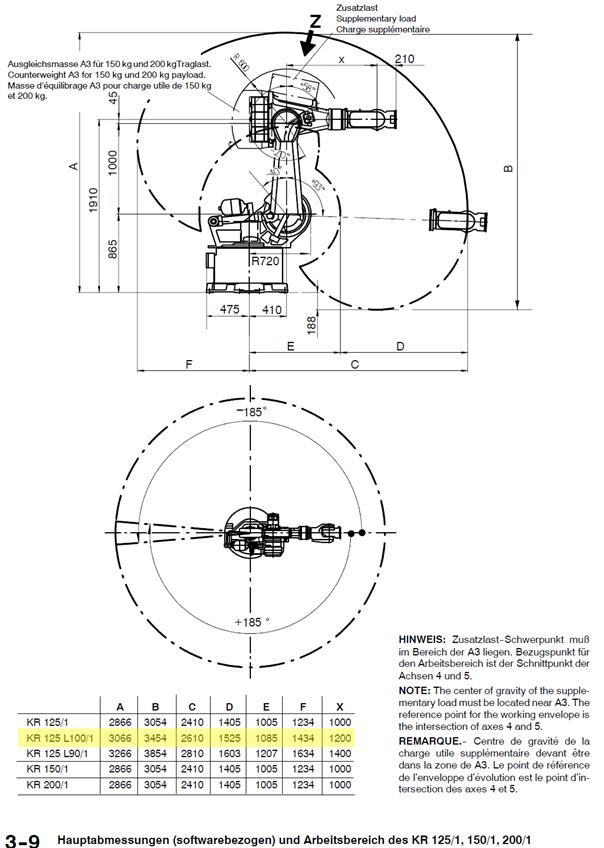
Traglast 125 kg an der Hand des KR 125/1 und eine für diese Nennlast
maximale Zusatzlast von 120 kg auf dem Roboterarm können auch bei
maximaler Armausladung mit Maximalgeschwindigkeit bewegt werden. Das
gilt auch für die Varianten KR 125 L100/1mit Nennlast 100 kg, Zusatzlast
120 kg. Alle Grundkörper
der beweglichen Hauptbaugruppen bestehen aus Leichtmetallguss. Dieses
Auslegungskonzept wurde im Hinblick auf wirtschaftlichen Leichtbau und
hohe Torsions- und Biegefestigkeit CAD- und FEM- optimiert. Hieraus
resultiert eine hohe Eigenfrequenz des Roboters, der dadurch ein gutes
dynamisches Verhalten mit hoher Schwingungssteifigkeit aufweist. Gelenke und
Getriebe bewegen sich weitgehend spielfrei, alle bewegten Teile sind
abgedeckt. Alle Antriebsmotoren sind steckbare, bürstenlose AC -
Servomotoren - wartungsfrei und sicher gegen Überlastung geschützt. Die Grundachsen
sind dauergeschmiert, d.h. ein Ölwechsel ist erst nach 20.000
Betriebsstunden erforderlich.
Alle
Roboterkomponenten sind bewusst einfach und übersichtlich gestaltet, in
ihrer Anzahl minimiert und durchweg leicht zugänglich. Der Roboter kann
auch als komplette Einheit schnell und ohne wesentliche
Programmkorrektur ausgetauscht werden. Überkopfbewegungen sind möglich. Durch diese und zahlreiche weitere Konstruktionsdetails sind die Roboter schnell und betriebssicher, wartungsfreundlich und wartungsarm. Sie benötigen nur wenig Stellfläche und können aufgrund der besonderen Aufbaugeometrie sehr nahe am Werkstück stehen. Die durchschnittliche Lebensdauer liegt, wie bei allen KUKA - Robotern, bei 10 bis 15 Jahren. Jeder Roboter wird
mit einer Steuerung ausgerüstet, deren Steuer-- und Leistungselektronik
in einem gemeinsamen Steuerschrank integriert sind (siehe gesonderte
Spezifikation). Sie ist Platz sparend, anwender- und servicefreundlich.
Der Sicherheitsstandard entspricht der EU--Maschinenrichtlinie und den
einschlägigen Normen (u.a. EN775). Die
Verbindungsleitungen zwischen Roboter und Steuerung enthalten alle
hierfür notwendigen Versorgungs- und Signalleitungen. Sie sind am
Roboter steckbar, auch die Energie-- und Medienleitungen für den Betrieb
von Werkzeugen (Zubehör ”Integrierte Energiezuführung für Achse 1”).
Diese Leitungen sind im Bereich der Grundachse 1 fest im Inneren des
Roboters installiert. Bei Bedarf können die Energie-- und
Medienleitungen für den Betrieb von Werkzeugen mit Hilfe von
Systemschnittstellen an den nachgeordneten Achsen entlang bis zum
Werkzeug geführt werden.
Die Robotermechanik
Der Roboter
besteht aus einem feststehenden Grundgestell, auf dem sich um eine
senkrechte Achse das ”Karussell” mit Schwinge, Arm und Hand dreht
Die Hand dient mit
ihrem Anbauflansch der Aufnahme von Werkzeugen (z.B. Greifer,
Schweißgerät). Die Bewegungsmöglichkeiten der Roboterachsen gehen aus
Bild 1-3 hervor. Die
Traglast und das Eigengewicht der Gelenkkomponenten werden durch ein in
sich geschlossenes, hydropneumatisches Gewichtsausgleichssystem statisch
weitgehend ausgeglichen. Es unterstützt die Achse 2. Seine Wirksamkeit
kann je nach Traglast und Zusatzlast des Einsatzfalles und je nach
Einbaulage des Roboters variiert werden. Die Wegmessung für die Grund--
und Handachsen (A1 bis A3 bzw. A4 bis A6) erfolgt über ein absolutes
Wegmeßsystem mit einem Resolver für jede Achse. Der Antrieb erfolgt
durch transistorgesteuerte, trägheitsarme AC--Servomotoren. In die
Motoreinheiten sind Bremse und Resolver raumsparend integriert. Der Arbeitsbereich
des Roboters wird in allen Achsen über Software--Endschalter begrenzt.
Mechanisch werden die Arbeitsbereiche der Achsen 1, 2, 3 und 5 über
Endanschläge mit Pufferfunktion begrenzt. Als Zubehör
”Arbeitsbereichsbegrenzung” sind für die Achsen 1 bis 3mechanische
Anschläge für eine aufgabenbedingte Begrenzung des jeweiligen
Arbeitsbereichs lieferbar.
Quellen: Spezifikationen,
Datenblatt der KUKA Roboter
GmbH (Spez KR 125, 150, 200 de/en/fr) Skript zu
Roboterversuch Teil2 Fakultät Maschinenbau |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|