|
Lösungskomponenten
A.1 - Motor
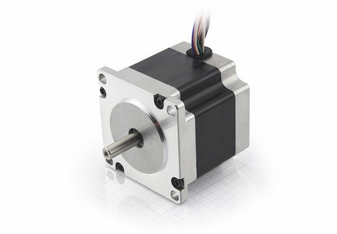 |
Abb. Nr.1: ST5918 — Schrittmotor - NEMA 23
|
Maximalspannung [VDC]
|
60
|
|
Nennspannung
[VDC]
|
24-48
|
|
Strom pro Wicklung [A]
|
3
|
|
Haltemoment
Bipolar [Ncm]
|
186,7
|
|
Schrittwinkel
[° ]
|
1,8 ±5%
|
|
Widerstand/Phase [Ω]
|
1,0±10%
|
|
Induktivität
pro Wicklung [mH]
|
1,9±20%
|
|
Massenträgheitsmoment Rotor [kgcm²]
|
0,48
|
|
| Vorteile: |
Nachteile: |
| Einfache Ansteuerung |
Größerer Bauraum |
| Standardisierten Elektroanschluss
an die gängigsten Motorsteuerungen |
|
| hohes Haltemoment |
|
| |
|
| |
|
A.1 - Motor
|
|
Abb. Nr.1: ST4118 — Schrittmotor -
NEMA 17
|
Maximalspannung [VDC]
|
60
|
|
Nennspannung
[VDC]
|
24-48
|
|
Strom pro Wicklung [A]
|
3
|
|
Haltemoment
Bipolar [Ncm]
|
80
|
|
Schrittwinkel
[° ]
|
1,8 ±5%
|
|
Widerstand/Phase [Ω]
|
1,1±10%
|
|
Induktivität
pro Wicklung [mH]
|
2,7±20%
|
|
Massenträgheitsmoment Rotor [kgcm²]
|
0,1
|
|
| Vorteile: |
Nachteile: |
| Einfache Ansteuerung |
geringes Haltemoment |
| Standardisierten Elektroanschluss
an die gängigsten Motorsteuerungen |
|
| kleinerer Bauraum |
|
| |
|
|
|
A.1 - ZLW 1040- Zahnriemenachsen
 |
Abb. Nr.2: drylin® ZLW 1040- Zahnriemenachsen
|
Zahnriemenbreite[mm]
|
15
|
|
Max. Hublänge [mm]
|
2000
|
|
Übersetzung [mm/U]
|
120
|
|
Max. Positionsabweichung des
Schlittens, lastabh.
[mm]
|
± 0,3
|
|
Max. Radialbelastung
[N]
|
200
|
|
Umlenkung
|
Rillenkugellager
|
|
| Vorteile: |
Nachteile: |
| Schnelles Positionieren kleiner
Lasten |
Positioniergenauigkeit von < 0,1 mm
schwierig |
| Für den Dauerbetrieb geeignet |
|
| |
|
| |
|
| |
|
A.1 - Führung Eigenkonstruktion
|
|
Abb. Nr.2: Führung
Eigenkonstruktion
|
drylin W Doppelschiene WS:
|
Ausführung: Doppelschiene
Material: Aluminium
Schienenprofil: Rund
Länge: 1500 mm
|
|
drylin W Komplettschlitten WW
|
Ausführung: rund
Material:
Gleitelement: iglidur J
Rollenlager
Länge: 100
mm
|
|
Zahnriemen
|
Profil T5
Material:
Thermoplastisches Polyurethan
mit Stahlzugstrang
Riemenbreite: 16mm
zulässige Riemenzugkraft 528N
Länge: 3100mm
|
|
Zahnriemenrad
|
Profil T5
Material:
Aluminium
für Riemenbreite: 16mm
Zähnezahl: 20
Durchmesser: 31mm
|
|
| Vorteile: |
Nachteile: |
| individuell anpassbar |
geringe Steifigkeit |
| leichte Bauweise |
Riemenrückführung schwierig |
| |
|
| |
|
| |
|
A.1 - Motortreiber Leadshine ND556
 |
Abb. Nr.3: Motor Treiber Leadshine ND556
|
Motorspannung
[VDC]
|
20-50
|
|
Nennspannung
[VDC]
|
24-48
|
|
Phasenstrom
[A]
|
1,4 bis 5,6 in 8 Schritten
einstellbar
|
|
Dauerstrom
[A]
|
4,0
|
|
Mikroschritt-Auflösungen
|
1/2 bis 1/128
|
|
Taktfrequenz
[kHz]
|
400
|
|
| Vorteile: |
Nachteile: |
|
Überspannungs- und Kurzschlussfest |
wenige Zusatzfunktionen |
| sehr günstig |
geringer
Phasenstrom |
| Universaler Motortreiber |
|
| |
|
| |
|
A.1 - Motortreiber D1 dryve von Igus
 |
Abb. Nr.3: Motortreiber D1 dryve
|
Motorspannung
[VDC]
|
12-48
|
|
Nennspannung
[VDC]
|
12-24
|
|
Phasenstrom
[A]
|
<14
|
|
Dauerstrom
[A]
|
7,0
|
|
Lastleistungsabgabe [W]
|
340
|
|
Taktfrequenz
[kHz]
|
400
|
|
Schutzfunktionen
|
Leistungsteil-Temperaturüberwachung,
Stromüberwachung, Unter- Überspannungsschutz,
Schleppfehlererkennung, Drehgeberkontrolle
|
|
Ein-Ausgänge
|
Analog Eingänge, CANopen, Modbus TCP zum
Anschluss an Mastersteuerungen wie z.B. Siemens oder
Beckhoff
|
|
| Vorteile: |
Nachteile: |
|
Überspannungs- und Kurzschlussfest |
teuer |
| viele
Zusatzfunktionen |
nur für
Igusmotoren geeignet |
| hoher Phasenstrom möglich |
|
| |
|
| |
|
A.1 - Gelenkköpfe
 |
Abb. Nr.4: Gelenkkopf mit Außengewinde
|
Gewinde
|
M10
|
|
Innendurchmesser [mm]
|
10,0
|
|
Außendurchmesser [mm]
|
30
|
|
| Vorteile: |
Nachteile: |
| Hohe Steifigkeit |
|
| Sehr hohe Dauerfestigkeit bei
wechselnden Belastungen |
|
| Geeignet für rotierende, oszillierende und lineare Bewegungen |
|
| Unempfindlich gegen Schmutz, Staub und Flusen |
|
| |
|
A.1 - Aluminiumwelle
 |
Abb. Nr.5: drylin® R Aluminiumwelle
|
Art.-Nr.
|
AWMR-12
|
|
Außendurchmesser [mm]
|
12
|
|
Ausführung
|
Rohr
|
|
Länge [mm]
|
425
|
|
| Vorteile: |
Nachteile: |
| Ausreichende Steifigkeit |
|
| Sehr hohe Dauerfestigkeit bei
wechselnden Belastungen |
|
| Geeignet für rotierende, oszillierende und lineare Bewegungen |
|
| |
|
| |
|
|