Ausarbeitung |
|
CAD-Konstruktionen und Aufbau
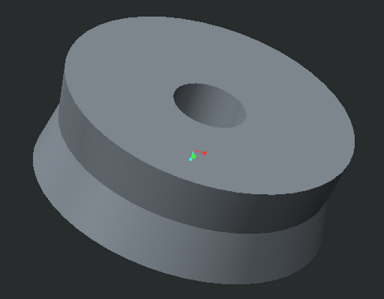

Umlenkrolle in CAD (links) und mit Rapid-Prototyping realisiert (rechts)
Downloadlink: Umlenkrolle.stl
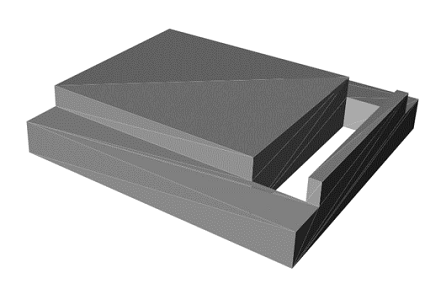
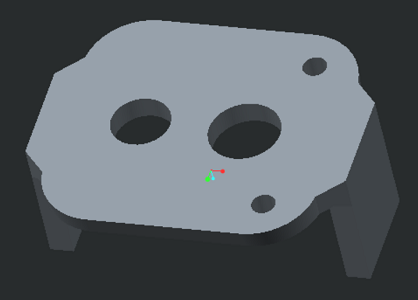
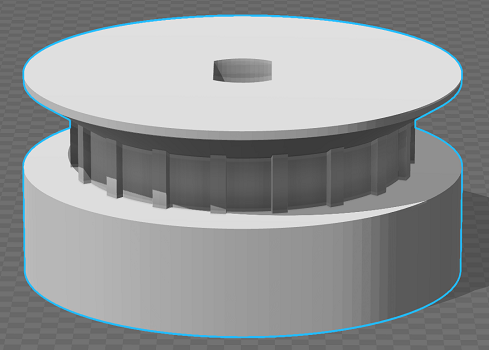
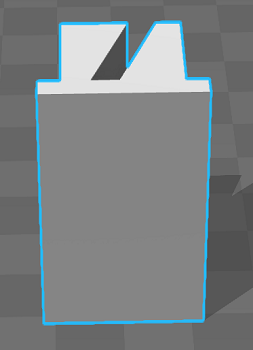
Motorhalterungführung (rechts), Motorhalterung (mitte) und Antriebsrolle (rechts) in CAD
Downloadlink: Motorhalterung.stl und Motorhalterung_Schiene.stl
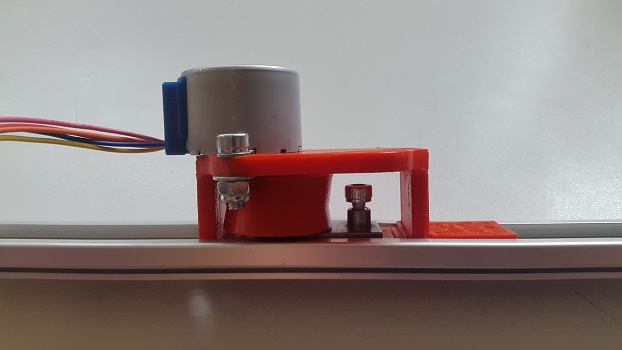
Gedruckter und aufgebauter Prototyp
Update: 02.11.16
Problem: Skalenseil rutscht von der Antriebsrolle und beim Blockieren stoppt dreht Motor weiter, da zu geringe Haftreibung. Aktuell kein Stromanstieg messbar.
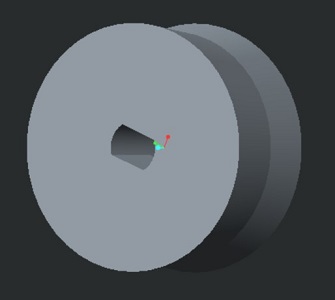
Lösung: Die Antriebsrolle wird überarbeitet und erneut ausgedruckt. Durch die harte Kante (unten) wird verhindert, dass das Skalenseil abrutscht. Nach einem Testlauf brachten die konstruierten Lamellen keine Verbesserung, weshalb mit einer Wasserbombe die gewünschte Haftreibung erreicht wird.
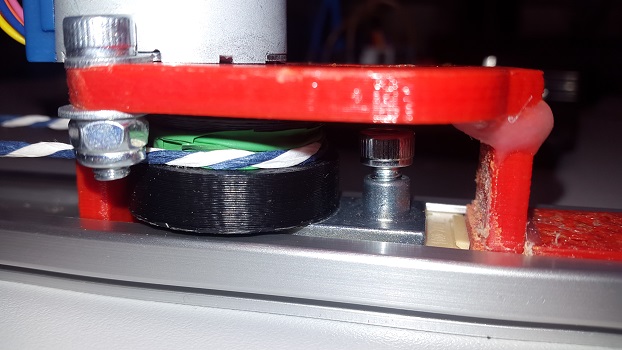
Downloadlink: Antriebsrolle_neu.stl
Um den beweglichen Schlitten einfach mit dem Skalenseil verbinden zu können und eine parallele Skalenseilführung zu garantieren, wird eine Seilfürung gedruckt. Des Weiteren wird eine Halterung, bestehend aus zwei Teilen, erstellt, die den Genuino 101 auf der Schiene fixieren soll.
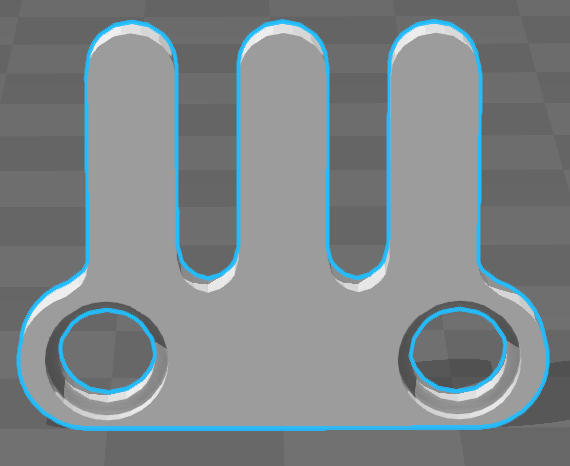
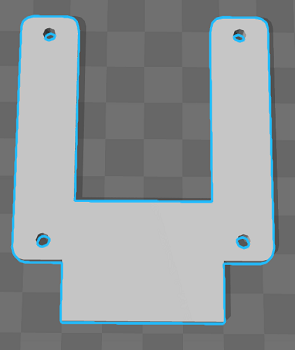
Downloadlink: Seilführung.stl, Adapter_Universal.stl, Adapter_Genuino.stl
Strommessung
Um den aufgenommenen Motorstrom bei Volllast und im Leerlauf zu ermitteln, wird eine Messreihe aufgenommen.
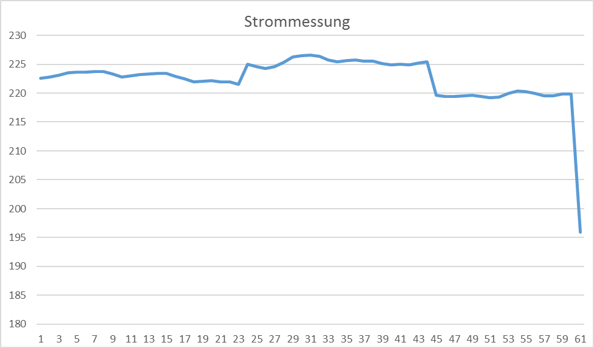
Zunächst wird der Motor im Leerlauf betrieben, dann blockiert. Der Strom steigt sprungartig bei ca. 24 Sekunden an.
Beim erneuten Freigeben sinkt der Strom auf das vorherige Niveau ab.
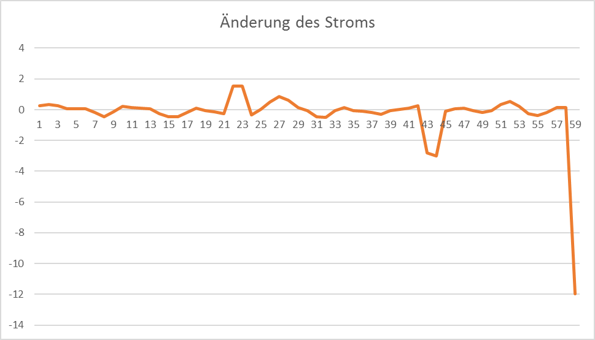
Leitet man diese Kurve ab, wird ein Maximum bzw. ein Minimum an den Sprungstellen deutlich.
Datenauswertung des Stromsensors Adafruit ina219:
Nach dem Einbinden des Stromsensors im Programm wurde ein Anfahren und Blockieren des Motors durchgeführt und aufgezeichnet.
Die erste Aufzeichnung ohne Glättung ist sehr verrauscht:
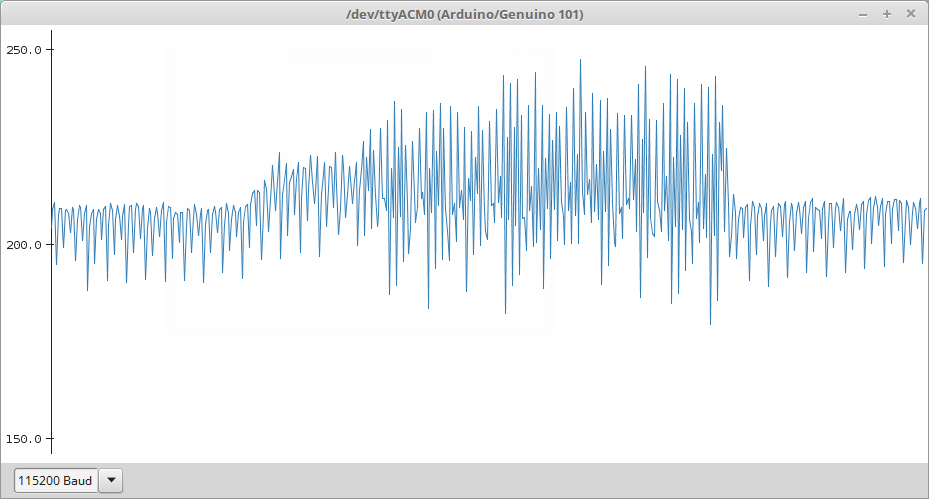
Im Bild zu sehen ist die freie Fahrt, stop und die wieder frei gegebene Fahrt.
Nach dem Hinzufügen eines Tiefpasses und einer Ableitung sieht das Blockieren wie folgt aus:
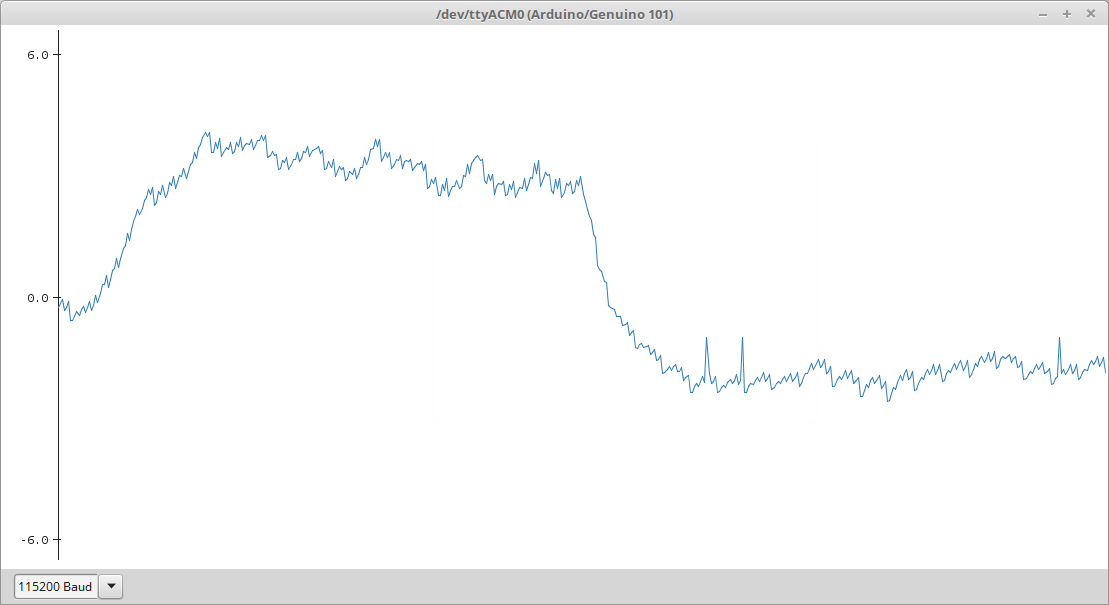
Das Signal ist nun deutlicher, weniger verrauscht und lässt sich für eine Auswertung gebrauchen.
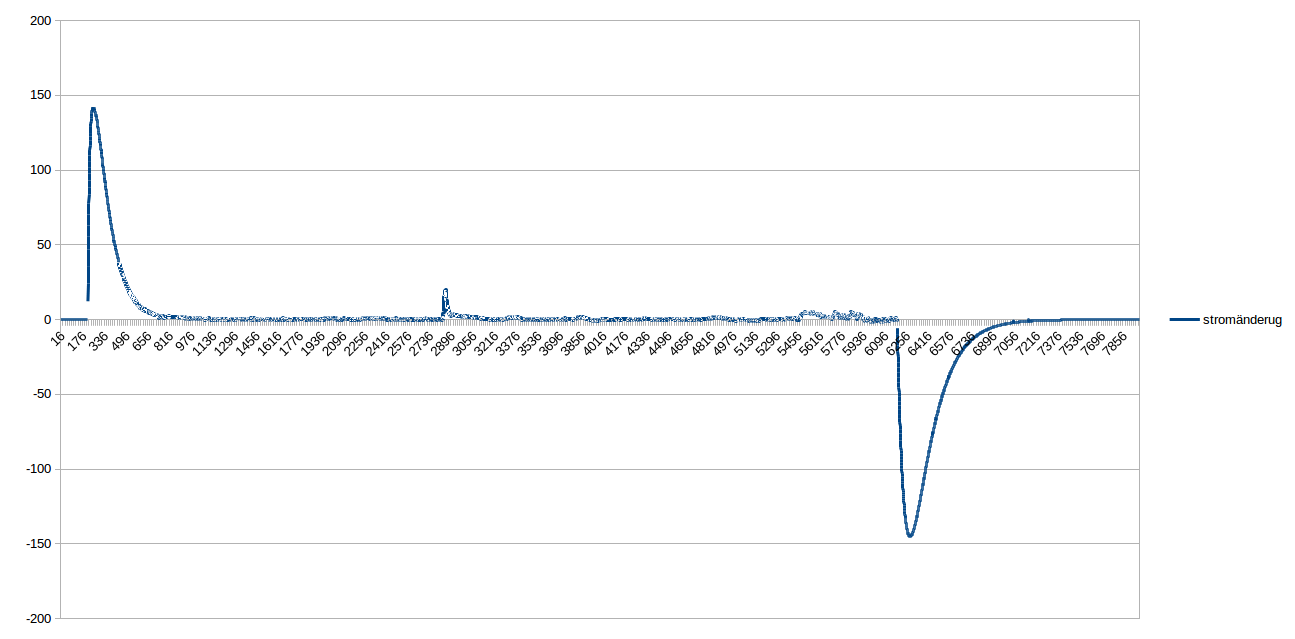
Der ganze Motorverlauf wird wie folgt aufgezeichnet:

Die großen Ausschläge am Anfang bzw. am Ende sind die
Stromänderung des Ein- bzw. Ausschaltens.
Die Stromänderung bei dem
Blockieren des Motors werden in dem vergrößerten Bereich deutlich.
Aus den aufgezeichneten Kurven wird ein Struktrogramm des benötigeten Codes erstellt.
UPDATE 15.11.2016
Bei einer Messung, bei der die Stromänderungswerte aufgezeichnet werden fällt uns auf, dass im Umkehrpunkt des Schlittens die Spitze der Stromänderung nicht so hoch ausschlägt wie zum Start- und Stopzeitpunkt. Der zunächst angesetzte Wert für die Detektion der Beschleunigung wird von 100 auf 10 herabgesetzt. Damit wird nun sichergestellt, das nach dem Umkehren die Beschleunigung sicher detektiert werden kann und der Schlitten im "loop"-Modus automatisch hin und her fahren kann.
Auswertung der Stroms
Pro:
- bei Überstrom wird abgeschaltet
Contra:
- Mittelwert des verbrauchten Stroms ist nicht konstant und ändert sich je nach Belastung des Schlittens
- Verrauschtes Signal durch Schrittmotor -> langsam durch Tiefpassfilter
Auswertung der Stromänderung
Pro:
- Messbare Änderung auch wenn sich der Mittelwert des verbrauchten Stroms ändert (realtive Messung)
Contra:
- Glättung nötig -> lagsam durch TP
- Nur wirksam wenn Zustand von laufen zu blockieren. Blockieren von Beginn der Messung wir nicht detektiert.
|
|