Schaltplan / Aufbau |
|
Schaltplan / Aufbau |
|
"breadboard"-Aufbau
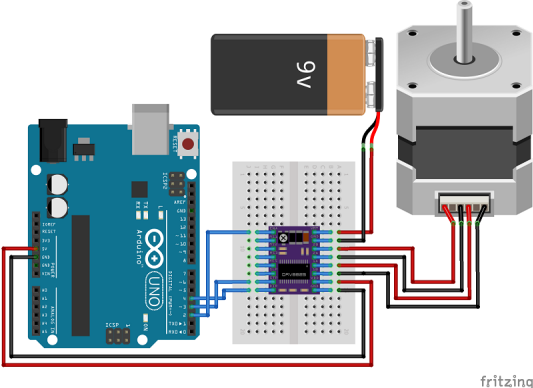
| Zunächst
wurde die Hardware (Arduino, PololuA4988, MotorSY57STH41-1006A) mittels
"breadboard" aufgebaut. Rechts zu sehen ist der entsprechende Aufbau,
nachgestellt per "Fritzing"-Software (www.Fritzing.org). Mit diesem Aufbau wurden beide Schrittmotortreiber (SilentStepStick, A4988) erstmals angesteuert. Die Spannungsversorgung des "Arduino"-Boards erfolgt per USB. |
 |
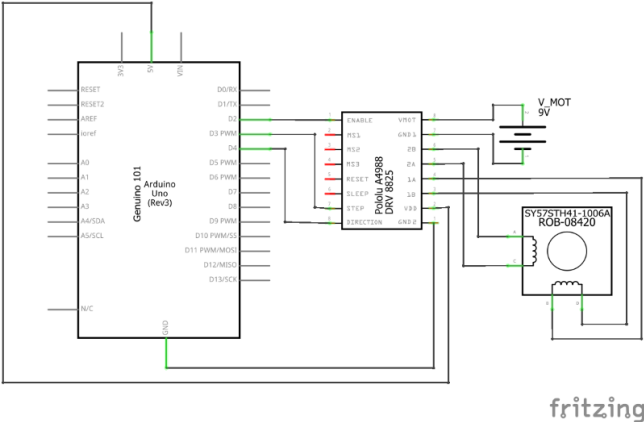
| Rechts zu sehen ist der, dem
"breadboard"-Aufbau entsprechende, Schaltplan. Der "A4988"- und der "silentstepstick"-Schrittmotortreiber sind "pinkompatibel", d.h. der Schaltplan gilt für beide Treiber! Über die Pins "MS1", "MS2" und "MS3" (beim "silentstepstick" "CFG1", "CFG2", "CFG3" ) lassen sich sogenannte Modi konfigurieren. So beherrschen sowohl der "A4988" als auch der "silentstepstick" den Lauf in Mikroschritten ( bis 1/16 Schritt ). In der Praxis verzichteten wir gezwungenermaßen darauf, die Motortreiber umzukonfigurieren. Dazu mehr im Abschnitt über das "FabScan-Shield"! |
 |
"Fabscan-Shield"-Aufbau
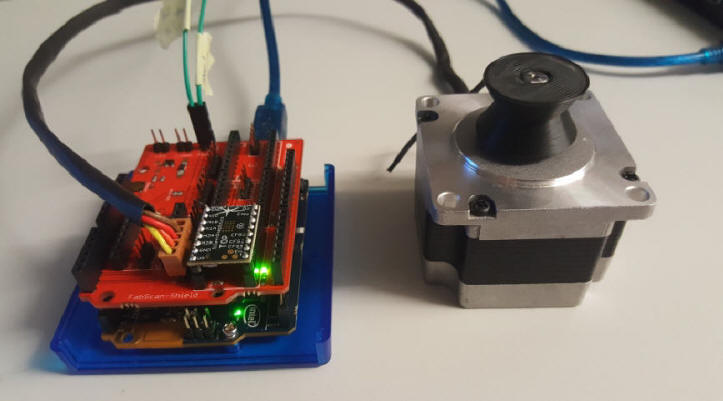 |
Auf der Abbildung links zu sehen ist der Aufbau mit "FabScan-Shield".
|
||
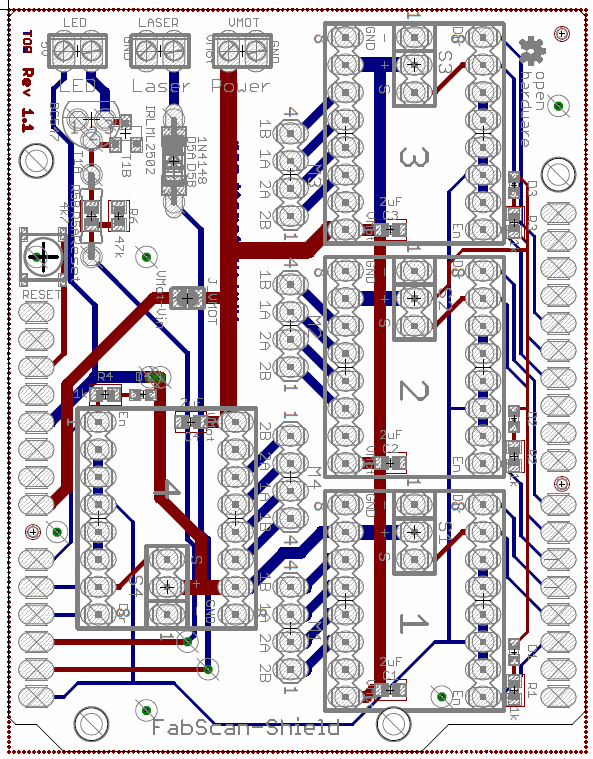
Rechts zu sehen ist die Draufsicht auf das
"FabScanShield". Wie man schnell erkennt hat das "FabScanShield" vier
Steckplätze auf die man jeweils einen Schrittmotortreiber ( z.B. "A4988"
) stecken kann. Diese Steckplätze sind von "1" bis "4" durchnummeriert.
Positiv ist dagegen anzusehen, dass der "Arduino" von dem "FabScanShield" mitversorgt wird, also die Spannungsquelle für den Motor ebenfalls den Arduino versorgt. Es ist jedoch darauf zu achten, dass die angelegte Spannung "VMOT" nie die empfohlene Versorgungsspannung des "Arduino" ( "Arduino 101" - 7 V bis 12 V ) über- oder unterschreitet. Leider gab es gelegentlich Probleme beim Programmieren des "Arduino" wenn wir die Spannungsquelle der Schrittmotoren angeschlossen ließen. Daher ist es zu empfehlen während des Programmiervorgangs die Spannungsquelle an "VMOT" zu entfernen! |
 |
||
"dB-Messung"-Aufbau
| Rechts zu sehen ist der Aufbau zur Messung der
Betriebsgeräusche des Schrittmotors ( "SY57STH41-1006A" ). Der Aufbau
entspricht, bis auf das Smartphone, dem "FabScanShield"-Aufbau. Dazu verwendeten wir ein "Apple iPhone 6s" und die kostenfreie App "Decibel 10th" aus dem "Apple AppStore". Mit dieser App lässt sich, abgesehen von einer präzisen Geräuschmessung, auch noch der angezeigte Graph exportieren ( "*.csv" ). 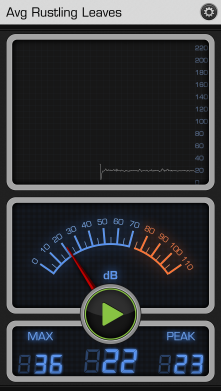 |
 |
|
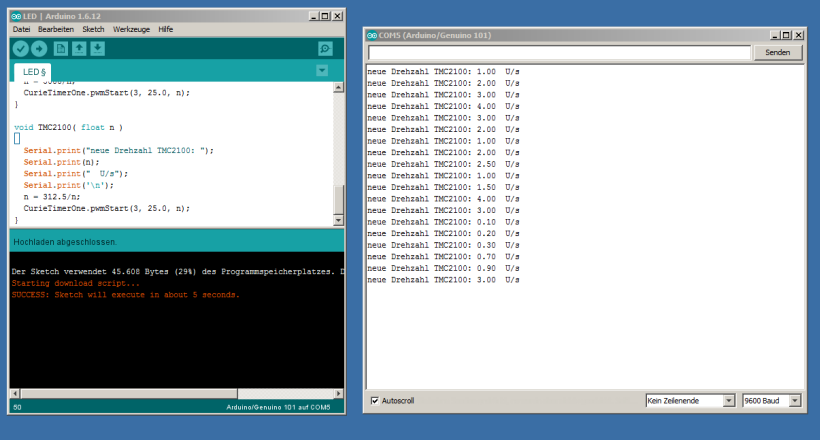
Mit jedem Motortreiber wurde eine Messung bei folgenden Drehzahlen
durchgeführt: Für die Durchführung der Messungen wurde ein "Arduino"-Programm geschrieben, welches über die serielle Schnittstelle die einzustellende Drehzahl entgegennimmt.
|
 |
|
|
