Ausarbeitung |
|
Rollschneider
 |
Um eine
kostengünstiges
Werkzeug
zu entwerfen und somit nicht eine neue Aufnahme für den Robotter zu
benötigen wird ein bereits vorhandener
Dreibacken-Greifer
verwendet. Dadurch ist die zylindrische Geometrie,
an welcher das Werkzeug gespannt ist,
vorgegeben.
Damit
gewehrleistet
ist,
dass die
Schneide
bei jeder Aufnahme in der selben
Position
zum Dreibacken-Greifer
sitzt und somit der Toolcenterpoint bestimmt ist,
wird am Werkzeug eine Fläche abgefräst um
die Lage eindeutig
zu definieren.
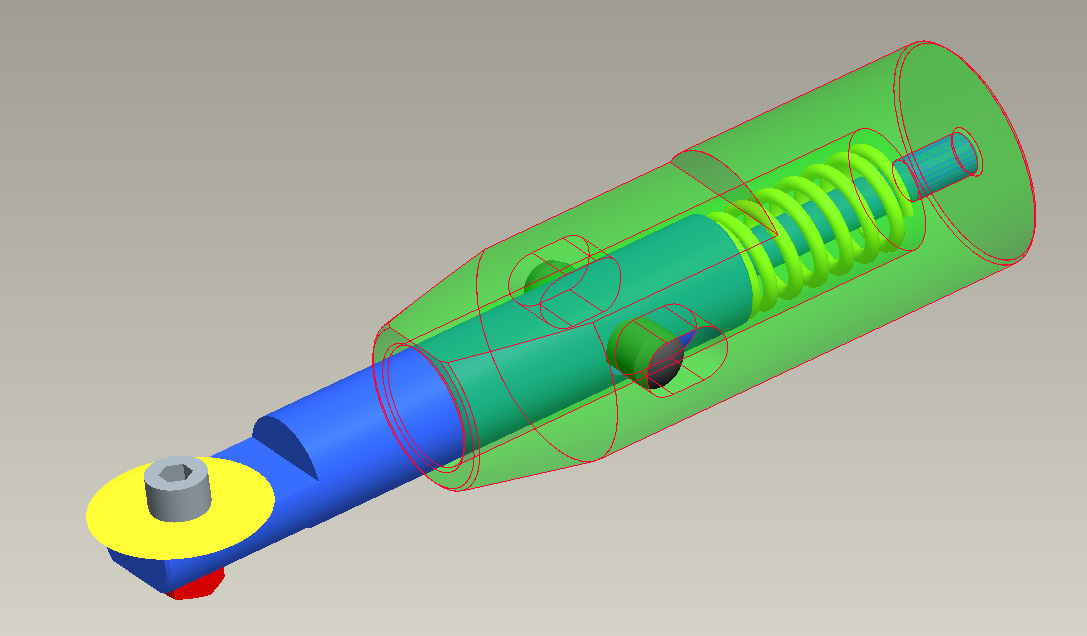
Das Werkzeug besteht aus zwei Hauptteilen. Ein Schneidstempel auf dem
die Rollschneide befestigt ist sowie ein Gehäuse, in dem
der
Schneidstempel läuft. Um die
Ungenauigkeit
des Roboters und die Schneidkraft zu kontrollieren ist eine Feder
zwischen Gehäuse und Schneidstempel
eingebracht.Der
Zylinderstift
dient zum
Einen
zur
Begrenzung des Federwegs
und
zum Anderen um das
Verdrehen
der Schneide
zu verhindern.
Um das Werkzeug zu schützen sind die beweglichen Teile geölt und dass
komplette Werkzeug aus
Messing gefertigt,
was
sich
gut
auf
die Notlaufeigenschaften
auswirkt. |
Pro/E Dateien Rollschneider_Pro_E.rar |
 |
Schneidetisch
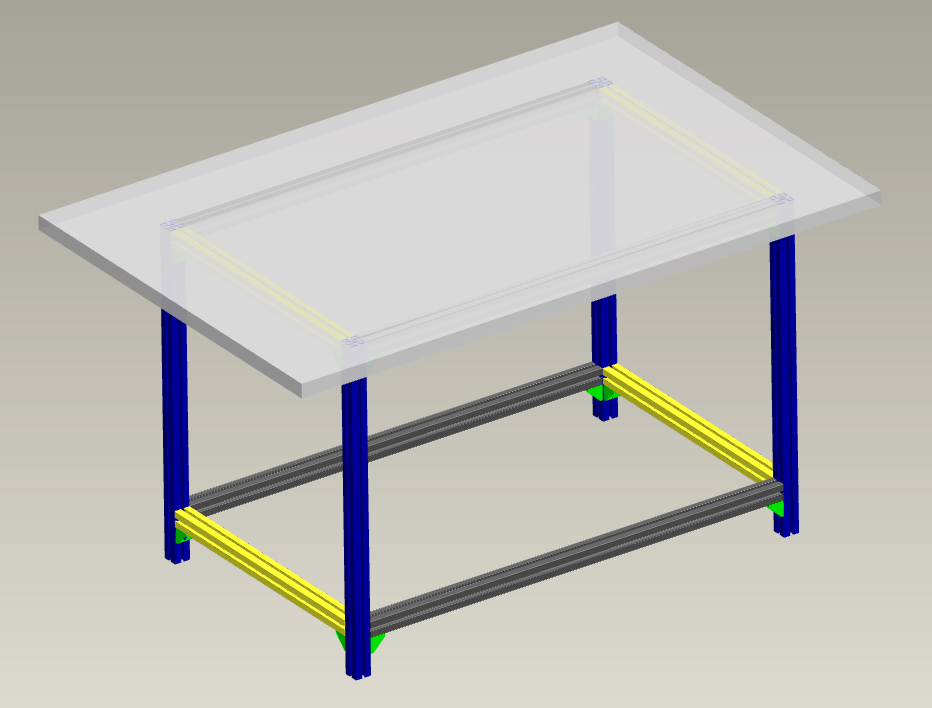 |
Der Schneidtisch wird aus
MiniTec-Profilen
zusammengestellt und durch eine 40 mm starke
Multiplexplatte
komplettiert.
Die eigentliche Schneidunterlage,
welche zum
Schutz
der Schneide und
das Verrutschen der
Glasfasermatte
verhindert,
besteht
aus drei verschiedenen Kunstoffschichten,
wobei sich die
Oberste
Schicht
nach jedem
Schnitt
wieder verbindet (selbstheilend). |
 |
 |
|
Pro/E Dateien Schneidetisch.zip Stückliste Stückliste Schneidtisch.xls |
|
|